
为了让机器人行走能够更加稳定,研发四足运动机器人的专家经常会花大量的时间来制定步态控制策略,同时也将预定任务的地形环境纳入考量,但日本研究人员最近找到了一种更为简单的方式来让四足机器人适应环境。
IEEE Spectrum 期刊指出,日本大阪大学的研究人员最近尝试采用了一种不同的方式,让机器人在不须倚靠任何感测器或控制器的情况下,透过搭载在腿上的低扭矩马达及身体和环境间的相互作用便能自动产生步态。
这个概念最令人惊喜的一点,便是搭载在每个腿上的低扭矩 DC 马达在动作时会自然产生的震荡模型,每个马达都透过纯粹的物理机制应对自身的缺陷,来延迟并调整腿的相对位置,进而产生出能够行走的步态。
(由于设备太过简易,这个设备似乎不太能够被称为是“机器人”,反而较像是一个自动化设备,但考量到研究者倾向以机器人称呼便继续沿用。)
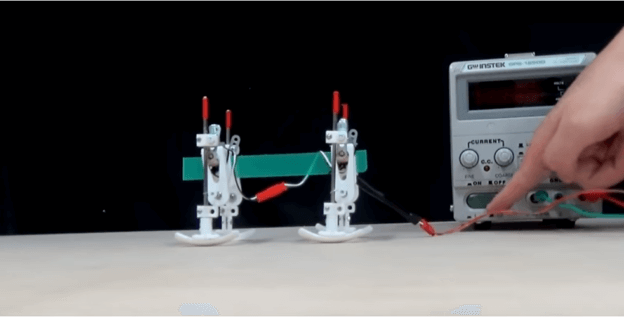
在这些实验中,唯一需要进行调整的便是这 4 台驱动行走马达的输入电压,研究人员不再需要为机器人的步态拟定控制策略,每个步态都是由地面和马达间的交互作用自然产生的。
目前团队在 2.5 伏特和 4 伏特的电压输入时,能够让四足机器人做出两种不同的稳定步态;2.5 伏特时,机器人会朝向对角线移动,4 伏特时则会以横向跑动。
研究人员认为,包括机器人的身体在移动时会怎么弯曲、身体部分的重量和重心的高度,这些固有结构都与步态变化有一定程度的相关。
透过机器人自身结构产生的步态,从某种程度来说也可以算是一种“自然振荡”,这也就是说透过不同的结构配置,不同的振荡将会产生不同的步态。
研究人员认为,它们的实验未来或许还能用来解释“四足动物调整步态的物理机制”,但也坦言还需要更多的证据来证实这个说法。
团队将在今年12月 5~8 日举办的 IEEE-ROBIO 大会上发布相关研究。
稿源:technews



